Integrated
Seismic Tomography

* Anton G. Kolonin1
Summary
The
integrated reconstruction of velocity sections (by travel times) and sections
of unified absorption-scattering factor (by preprocessed amplitudes) is applied
for wide range of seismic prospecting problems. The different data gathering
schemes are considered for getting input for the tomography reconstruction.
Along with conventional iterative algorithms, the new correction of back
projection algorithm is developed. The special interpretative post-processing
is applied for reconstructed sections in order to increase the geological
comprehension.
Introduction
There are
known techniques and applications of tomography approach [1] in seismic
prospecting [2]. The techniques implement the various solutions for inverse
seismic problem on the basis of integral geometry. The underlying algorithms
are intended to reconstruct the function by the integrals of the function.
The approach
is adapted from the medical tomography where the convolution – back projection
algorithm is commonly used because of its high-resolution power. On the
contrary, the geometrical conditions of the seismic survey do not enable to
apply the conventional convolution – back projection algorithm and that is why
iterative algorithms are commonly used in the seismic tomography even though
the resolution power of the algorithms is not high enough. Many of existing
seismic tomography techniques are oriented toward processing specific to travel
times of amplitude data, which doesn’t enable to use the whole scope of seismic
information. Also, some tomography processing algorithms are favorable for
specific geometries of seismic data acquisition and pre-processing graphs. The
latter makes it impossible to involve all possible seismic data into tomography
inversion. Usually, the results of seismic tomography inversion are distorted
with artifacts induced by the irregularity of the most of seismic data
collection geometries, which makes it difficult to perform the geological
interpretation of the obtained sections.
At the
beginning of the research, we were considering this to be a vital problem to
unify the different seismic acquisition geometries, processing of different
types of seismic data and inversion of different characteristics of seismic
waves under the one integrated approach, enabling the clear geological
interpretation of the results.
Solutions
The developed
algorithmic framework [3,4] includes the ways to describe the geometry of any
seismic data collection schemes including, but not limited to the following.
-
cross-borehole
seismic (reconstruction of inter-borehole sections)
-
borehole-surface
and surface-borehole seismic (reconstruction of near-borehole sections)
-
cross-mine
underground seismic (reconstruction of inter-mine and inter-drift sections)
-
reflection
wave seismic (reconstruction of vertical sections above the reflecting
boundaries)
-
refraction
waves seismic (reconstruction of horizontal sections within the refractive
boundary)
The seismic
data obtained with the geometries listed above may be transformed to unified
representation so that the same reconstruction algorithms may be applied to any
data in any possible combination. The Figure 1 illustrates the possible
geometries for seismic surveys in the oil and gas industry.
For the
seismic inversion, the model presented on the Figure 2 is employed. It is
assumed that seismic waves are propagating along the linear trajectories. The
travel time is assumed to linearly depend on velocity while amplitude is
assumed exponentially depending on thermal absorption and diffraction loss
(scattering). The function to be reconstructed is described as matrix of cells
where the value is constant within the cell. The input data are represented as
set of rays for given source/shot point (SP) and receiver/geophone point
The model employed
for the seismic tomography inversion
(GP)
coordinates.
Figure 2
Accordingly to
the table below, the travel times as well as amplitudes may be reduced to
abstract projection data to be considered as result as simple smoothing
(integration) of the medium parameters (to be reconstructed) along the seismic
ray trajectory. For the kinematic problem, the source value is the slowness
(inverse to velocity) while the projection data are travel times normalized by
the ray length. For the dynamic problem, the source value is the absorption-scattering
factor while the projection data are logarithms of amplitudes normalized by the
conditions in the source and geometric divergence normalized by the ray length.
In such a case, the basic coefficients for the direct and inverse problems are
determined as smoothing factors by each ray-cell pairs, separate rays and
separate cells. In turn, the direct problem is described as smoothing of the
source function over the ray trajectories. That is, the universal definition of
the problem enables to build inversion algorithms for different medium
parameters, different characteristics of seismic waves and different geometries
of data collection.
|
Problem Values |
Processing of seismic wave amplitudes,
reconstruction of absorption-scattering factor |
Processing of seismic wave travel times,
reconstruction of velocities |
|
Input data
|
Logarithms of normalized amplitudes, nep [nepers]
|
Travel time, sec [seconds]
|
|
Target parameter
|
Absorption-scattering factor, nep/m [nepers by meters]
|
Slowness – inverse to velocity, sec/m [seconds by meters]. 1
/ |
Respectively,
regardless of the input data and target parameter, the abstract direct
projection data ![]() may be simply derived from the average
may be simply derived from the average![]() along
the ray trajectory over the medium parameter
along
the ray trajectory over the medium parameter ![]() .
.
![]()
![]()
For the
high-resolution reconstruction of seismic sections, along with conventional
iterative algorithms, we developed the correction of back projection (CBP)
algorithm. The section of back projection is considered as result of double
smoothing of the original section. The first smoothing is determined by the
forward projection – the integral effect on the seismic wave traveling through
the media. The second smoothing is determined by the back projection operation
on itself. We can build the two-dimensional filter for such operation to be a
typical smoothing filter.
From this
perspective, the inverse problem gets reduced to the construction of the filter
inverse to the smoothing filter denoted above. Then, the reconstruction is
obtained by means of making two-dimensional convolution of the latter filter
with the back projection section. Such inverse filter may be built within the
approximation of locality of anomalies within the session. Irregularity of the
data gathering geometry conditions variable functions for the smoothing and inverse
filters, depending on the coordinates of the each cell of reconstruction
relatively to the ray trajectories. Because of this reason, the algorithmic
implementation of the entire transformation may be reduced to the direct
computation given the forward-backward projection operator and the back
projection section. That is, the conventional Radon Transform (differentiation
with one-dimensional convolution plus two-dimensional back projection) gets
replaced with two-dimensional back projection followed by the two-dimensional
convolution. On one hand, this interchange appears valid because of the
linearity of all transformations. On the other hand, this gives ability to
handle geometrically irregular data peculiar to seismic surveys. Also, the
simplified and less expensive (from computational perspective) version of CBP
algorithm is developed and called stacking deviations (SD) algorithm.
Results
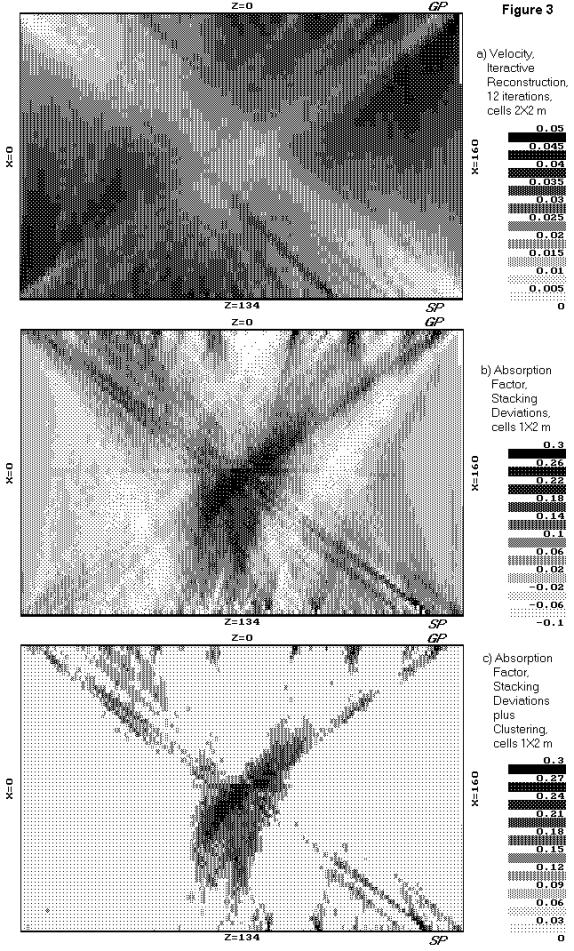
The
approach described above has been implemented as software system “Geotomo” and
it has been applied to wide range of geo-seismic problems. For one example,
presented on the Figure 3, we consider the investigation of the tectonic zone
in the salt mine obtained with cross-mine seismic screening between the two
drifts. The CBR algorithm appeared unacceptable for the reconstruction of
velocity section so we applied the iterative algorithm SIRT (Figure 3a). On the
contrary, CBR and SD algorithms appeared to be the best options for the
reconstruction of absorption-scattering factor enabling to detect the
distinctive anomalies (Figure 3b). Respectively, the different cell sizes have
been found more appropriate for different sections and algorithms. The special
interpretative processing (such as threshold differentiation based on
clustering technique) applied to results of the reconstruction made the results
more informative from geological perspective and enabled to increase the
signal-to-noise ratio (Figure 3c). Finally, the combination of different
sections obtained using different algorithms enabled to obtain the versatile
information about the geological object of study.
Conclusions
The integrated
approach for treating the travel times and dynamic characteristics of seismic
waves for the tomography reconstruction is developed. The approach enables to
use the same algorithmic framework for direct reconstruction of velocity
sections (from the travel times) and sections of absorption-scattering factor
(from the preprocessed amplitudes). The combined reconstruction of velocity
sections and sections of absorption-scattering factor, for different
observation geometries makes the interpretation more informative and allows to
exclude artifacts appearing because of errors specific to travel-times or
amplitude data or certain data collection schemes. The developed correction of
back projection algorithm is developed and it appears to be useful for the
localization of weak heterogeneities and reconstruction of complex structures.
The different types of seismic data (travel times or amplitudes) may require
different reconstruction algorithms or different settings for algorithms (such
as cell sizes for reconstructions or amount of iterations). The “Geotomo”
software system appears to be the suitable tool for described investigations
(the system is presented on the World Wide Web at http://www.webstructor.net/geotomo).
Acknowledgements
We are
grateful to S.S. Andreiko (Belorussian VNII of Halurgy) who provided the field
seismic data, Y.P. Menshikov (Bazhenovskaya Geophysical Expedition) who
supported development of the “Geotomo” system, and A.D. Ruban (A.A. Skochinsky
Institute of Mining) who encouraged the research.
References
1. Hermen G, Reconstruction
of images by projections: Basics of reconstructive tomography. - Moscow: Mir,
1983. - 353 pp.
2. Belfer I.K., Nepomnyashih I.A., Seismic tomography. - Moscow.:
VIEMS, 1988. - 70 pp.
3. Kolonin A.G., Possibility of using transmission seismic waves for local inhomogeneities localization. - Geology and Geophysics, Novosibirsk, 1988, V.3, pp.101-110.
4. Kolonin A.G., Seismic
tomography using the amplitudes of seismic waves. - Russian Geophysical
Journal, Saint Petersburg, 2002, 25-25, pp. 12-18